Arduino - pulsně šířková modulace (PWM) v C(++)
Datum: 12:33 31.10.2011
Pulse Width Modulation (PWM) lze přeložit jako pulsně šířková modulace. Jde o signál, kdy z pinu Vašeho AVR čipu, ať už je to Arduino nebo ne, vychází hodinový signál, který vyvolává hardware sám na pozadí a nijak neovlivňuje chod hlavního programu vašeho procesoru.
Tento pulsující signál se využívá za pomocí jednoduchého triku k různým úkonům. Nejčastěji udávaným příkladem použití PWM je pohaslá LED dioda, nebo dokonce její pomalé rozsvícení a zhasínání. Trik tohoto efektu je v hustotě po sobě rychle jdoucích signálů 1 a 0, které velmi rychle rozsvěcejí a zhasínají LEDku tak, že lidské oko vnímá až průměr času rozsvíceného a zhaslého. Jinak řečeno LEDka bliká tak rychle, že to není poznat, místo toho je ale pohaslá.
Stejný trik se využívá i u DC motorů, které jsou místo trvale sníženého napětí, vystaveny napětí normálnímu, ale v jednotlivých impulzech. To v konečném výsledku způsobí že DC motor se netočí tak rychle, jako kdyby byl napětí vystaven trvale, nicméně na své síle neztratí, což by se v případě menšího napětí stalo.
Poslední „trik”, který se s PWM používá je RC filtr, který díky časovému zpoždění změní střídání jedniček (5V) a nul (0V) na průměrné napětí, například 3.8V.
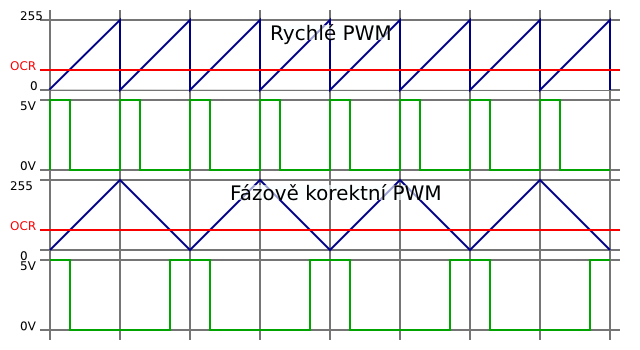
Průběh PWM signálu na pinu(zelená) dle nastavení OCR (červená) v závislosti na čítači (modrá).
Před tím, než si ukážeme jak tyto pulsy vyvolat, je třeba si říct alespoň něco málo o časovačích. Časovač (TIMER) funguje nezávisle na provádění kódu v procesoru. Jde o subsystém, který je ovládán pomocí registrů. Jedna z hlavních částí časovače je čítač (TCNT). Ten bývá 8 bitový nebo 16 bitový a podle toho umí nabývat hodnot 0 - 255 (8b) nebo 0 - 65535 (16b). Do čítače je každý tik uložena hodnota. Po dosažení maxima (nemusí tomu tak vždy být, ale to už je nad rámec tohoto článku) je tato hodnota vynulována, a počítá se znovu.
#include <avr/io.h>
#include <avr/interrupt.h>
volatile uint8_t count;
int main(void) {
// nastavi prescaler => FCPU/64
TCCR0B |= (1<<CS02)|(1<<CS00); // na 16MHz => 16Mhz/256/1024 = 61.03515625
TIMSK0 |= (1<<TOIE0); // povoli Overflow Interrupt
TCNT0 = 0; // inicializuje citac
DDRB |= (1 << PB5); // na portu B nastavi 6. bit na vystupni mod
count = 0; // inicializace globalni promenne
sei(); // povoli presuseni vyvolane casovacem
while(1); // nekonecna smycka
return 1; // toto nenastane, budme ale slusni
}
/* Toto je obsluzna rutina preruseni casovace TIMER0.
CPU tuto rutinu samo pusti po preteceni citace */
ISR(TIMER0_OVF_vect) {
count++;
if(count == 61) { // 61 kroku je potreba k casovani ~1 vteriny
PORTB ^= (1 << PB5); // invertuju hodnotu sesteho bitu
count = 0;
}
}
Ve skutečnosti, nemusí být časovač jen inkrementován a nemusí to být každý tik procesoru. Tiky lze ovládat a to dvěma způsoby. Je možné je zředit pomocí hodnoty řídícího registru (TCCR), kterým lze časovač úplně vypnout (výchozí stav), nebo nastavit tzv. prescaler (nevím jak toto slovo přeložit, raději to dělat nebudu). Tím lze nastavit, že zásah do čítače bude vykonán každý 8mý, 64tý, 256tý, nebo 1024tý tik. Tiky lze také generovat externím zdrojem. Díky tomu, lze získat „přesný” čas bez ohledu na kód probíhající v CPU.
Časovač navíc funguje v několika módech, pro naše účely je rozdělíme do dvou druhů. V prvním případě je vyvoláno přerušení, to lze snadno obsloužit naší vlastní funkcí. V druhém případě jde o PWM. Díky němu můžeme přes registr vysílat PWM signál na příslušném pinu bez toho, aby jsme se o jeho průběh (nahazování jedničky, resp nuly) museli nějak starat.
#define F_CPU 16.0E6
#include <avr/io.h>
#include <util/delay.h>
/*
Tt = 1 / ( FCPU / prescaler) (pokud prescaler používá FCPU)
Tp = Tt * 255
Ton = Tt * OCR
Toff = Tp - T1
Vrc = (OCR / 255) * 5v
Tt = 1 / (1MHz / 1024) = 1 / 976.5625 = 0.001024 s
Tp = 0.001024 * 255 = 0.26112 s
Ton = 0.001024 * 64 = 0.065536 s
Toff = 0.26112 - 0.065536 = 0.195584 s
Tt = 1 / 1MHz = 1us
Tp = 255 us
Ton = 64 us
Toff = 255 -64 = 191us
Vrc = 64 / 255 * 5 = 1.25
*/
int main(void) {
uint8_t pulses = 0;
TCCR2A |= (1<<WGM20)|(1<<WGM21);// Rychlé PWM
TCCR2A |= (1<<COM2A1); // práce s registrem OC0A dle módu PWM
TCCR2B |= (1<<CS20); // bez škálování
DDRB |= (1 << PB3); // nastaví OCR2A (PB3) pin jako výstupní
while(1) {
for(pulses = 0; pulses < 128; pulses++) {
OCR2A = pulses; // parametry vysílaného signálu
_delay_ms(20);
}
for(pulses = 128; pulses > 0; pulses--) {
OCR2A = pulses;
_delay_ms(20);
}
}
return 1;
}
Celé kouzlení s PWM tedy spočívá v nastavení časovače: mód pro PWM, prescaler, práce s čítačem a nakonec v nastavení příslušné hodnoty do registru, který vyvolá PWM na pinu s danou hustotou kladného napětí 5V, viz kód.
Detailnosti a hlavně možnosti Vašeho MCU lze dočíst v kvalitní a podrobné dokumentaci, kterou výrobce k čipům uvolňuje. K článku jsou také připojeny zdrojové kódy pro USBtiny zapojení, které je založeno na čipu ATtiny2313A, jehož cena v GM včetně součástek je kolem 100 Kč s tím, že pokud nechcete používat USB komunikaci a stačíte si s taktem 1MHz, asi polovinu součástek vůbec nepotřebujete. Vlastně stačí jen čip, odpor a jeden kondenzátor ;)
Autor:
Ondřej Tůma
Tweet
Discussion
Your comment:
© 2025 Ondřej Tůma McBig. Ondřej Tůma | Based on: Morias | Twitter: mcbig_cz | RSS: články, twitter